Với sự phát triển nhanh chóng của dịch vụ hậu cần thông minh và kho bãi thông minh, xe nâng hàng tự động đã ra đời để tiết kiệm chi phí vận hành và cải thiện hiệu suất an toàn của kho hàng. Leishen đã phát triển một bộ hoàn chỉnh các hệ thống ứng dụng xe nâng không người lái có thể được áp dụng cho các trung tâm lưu trữ hậu cần lớn dựa trên cảm biến lidar, có thể được triển khai hiệu quả trong việc xếp dỡ hàng hóa theo yêu cầu trong nhà và ngoài trời, chẳng hạn như cảng, sân bay, kho xưởng và trung tâm hậu cần, v.v.
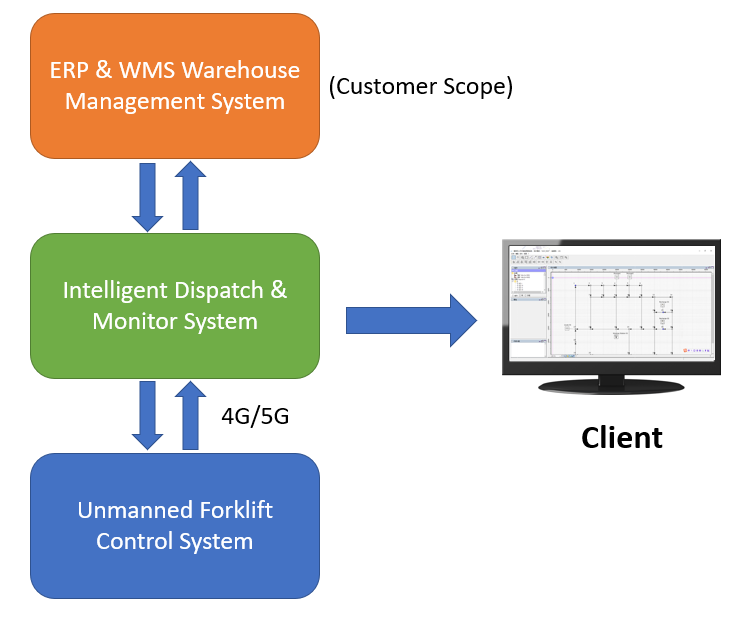
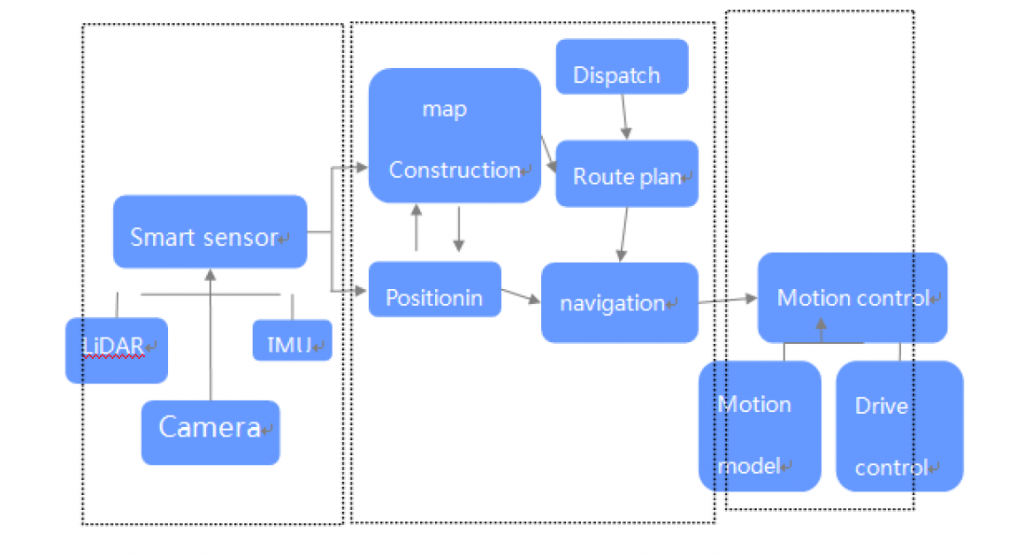
Hệ thống tương thích với hầu hết các xe nâng điện có cổng CAN bus cho người lái xe nâng. Cấu trúc tổng thể của hệ thống được thể hiện trong hình dưới đây: