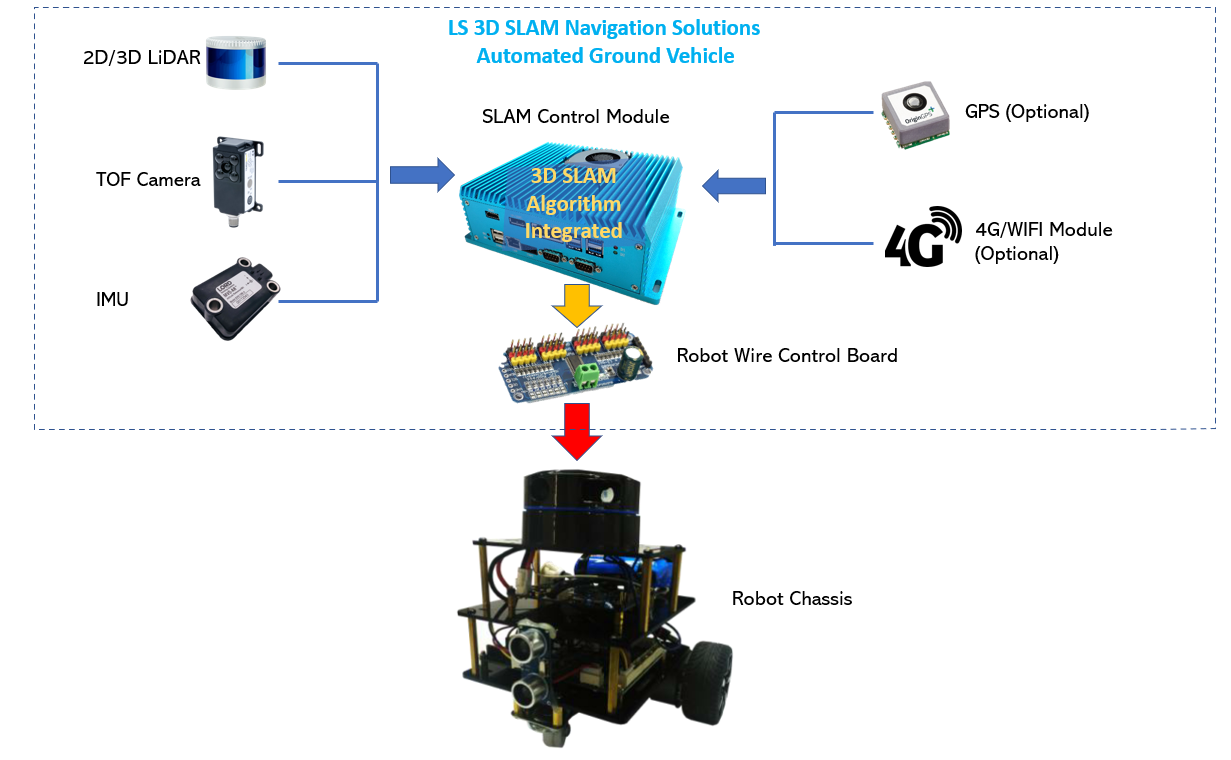
LS AGV & Robots 3D SLAM Navigation 시스템은 다중 센서 융합을 사용하여 2D/3D 라이더, TOF 카메라, GPS, 초음파, 적외선, 낙하 방지, 자이로스코프, 주행 거리계 및 기타로 자율 포지셔닝 및 탐색을 실현하는 빠른 방법을 제공합니다. 초기 개발 단계에서 관련 개념이나 프로젝트를 평가하기 위한 센서. 이 솔루션은 우수한 환경 인식, 높은 견고성 및 정확한 위치 지정을 제공하며 다양한 다운스트림 인터페이스에 편리하고 원활하며 빠르게 액세스할 수 있는 완벽한 문서 도구를 갖춘 오픈 소스 플랫폼이기도 합니다.