カメラやスピードレーダーなどの従来の路傍監視装置と比較して、LIDARにはかけがえのない利点があります。
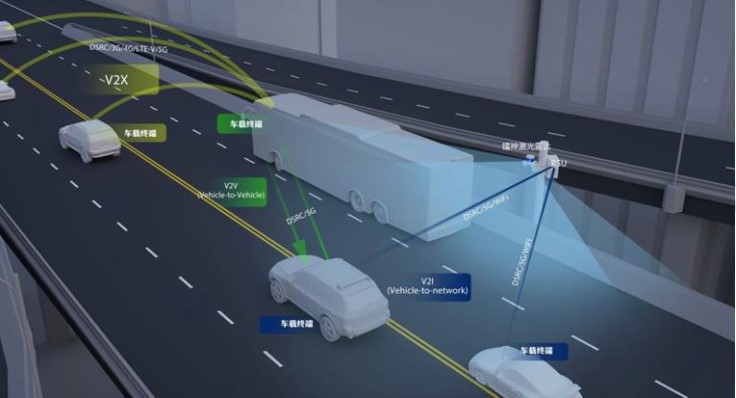
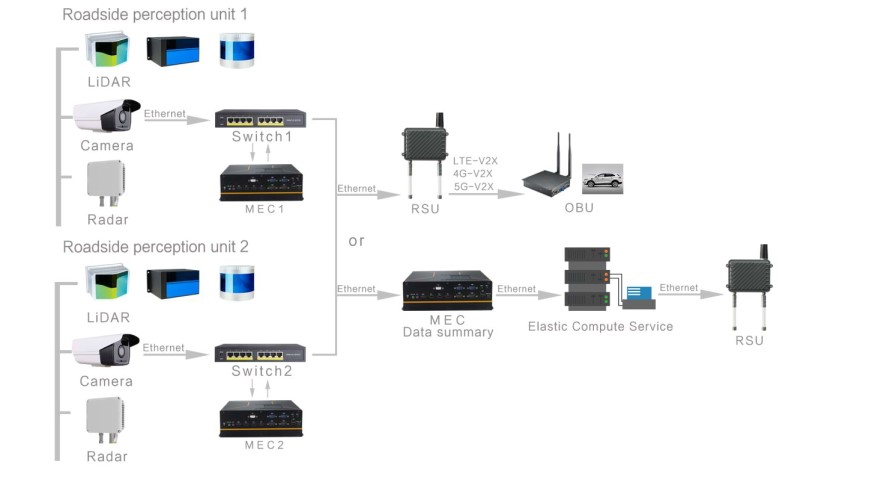
Lidarは、長距離検出に優れており(最も遠い検出距離は200メートル以上に達する可能性があります)、環境の3D空間データを提供できます。したがって、安全性の冗長性の一部として、路側ライダーは他のセンサーとのデータ融合を通じてシステム全体の精度と安全性を向上させます。アルゴリズムのサポートにより、LiDARシステムは次のことを実現できます。
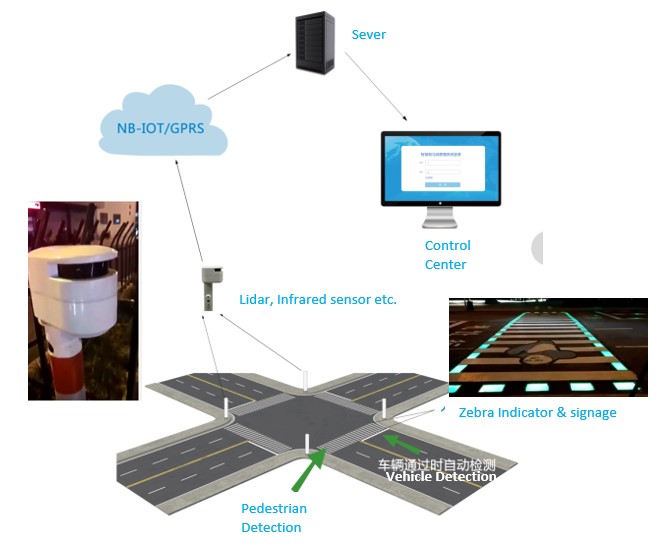
(1)乗用車、トラック、トラック/バス、オートバイ、歩行者、自転車などの動的なターゲットを、プライバシーを侵害することなく識別して区別します。
(2)位置と方向、速度、加速度、操舵角、物体間の時間距離/間隔、および動的ターゲットの他のパラメータを継続的に出力します。
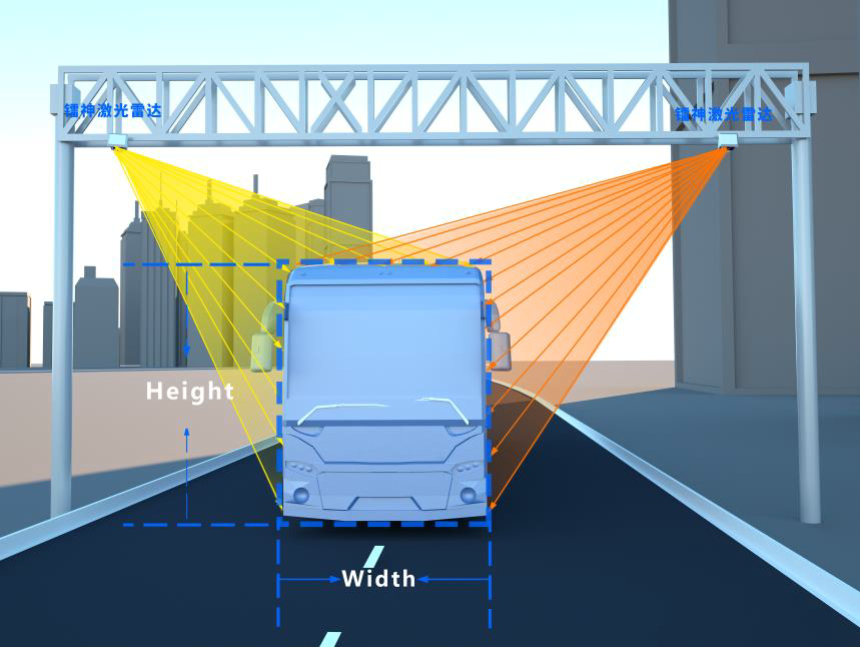
パフォーマンスの観点から、道路端では、LIDARの検知範囲と解像度を大きくする必要があります。たとえば、高速道路のシーンでは、道路脇のLIDARは、車両の意思決定により多くの時間を確保するために、遠くにある小さな物体を正確に検出する機能を備えている必要があります。
LS LIDARは、V2X / Smart Cityアプリケーション向けに、さまざまな範囲、チャネル、およびコストで幅広いLiDAR製品を提供し、ほとんどのV2Xアプリケーション要件を満たします。