Dengan perkembangan pesat logistik cerdas dan pergudangan cerdas, forklift otomatis telah muncul untuk menghemat biaya operasi dan meningkatkan kinerja keselamatan gudang. Leishen telah mengembangkan satu set lengkap sistem aplikasi forklift tak berawak yang dapat diterapkan ke pusat penyimpanan logistik besar berdasarkan sensor lidar, yang dapat digunakan secara efektif dalam penanganan kargo kebutuhan indoor dan outdoor sesuai permintaan, seperti pelabuhan, bandara, gudang pabrik dan pusat logistik, dll.
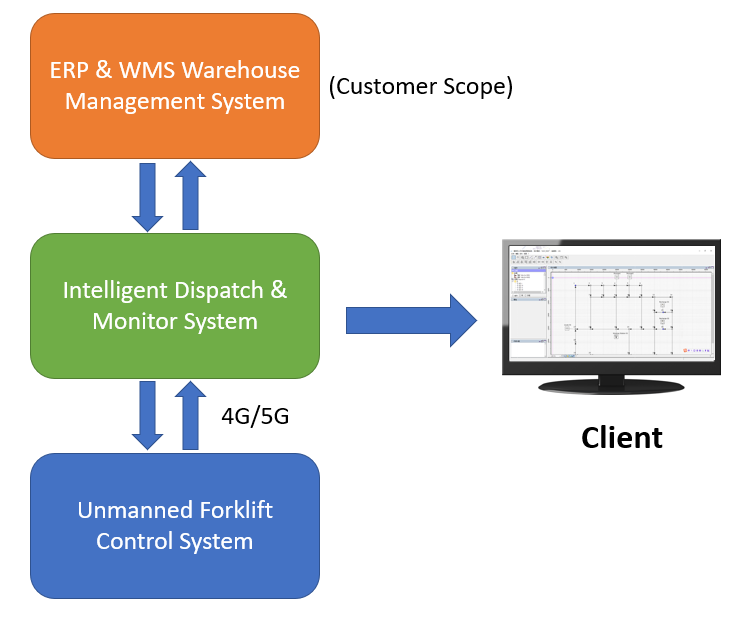
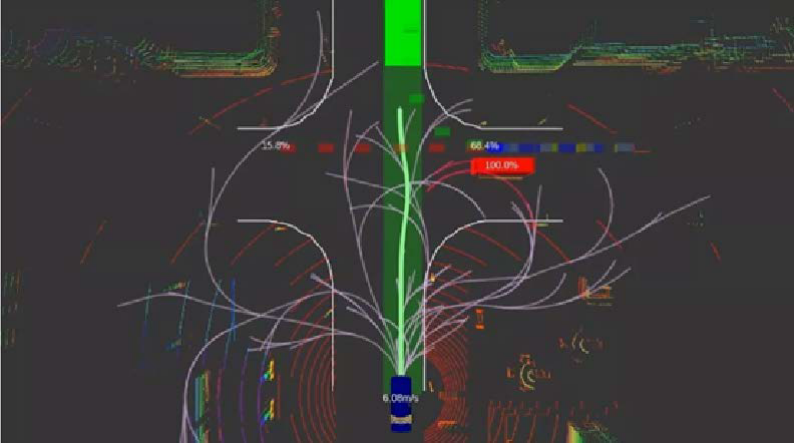
Sistem ini kompatibel dengan sebagian besar forklift listrik yang memiliki akses bus CAN ke pengemudi forklift. Struktur sistem secara keseluruhan ditunjukkan pada gambar di bawah ini: