مع التطور السريع للخدمات اللوجستية الذكية والتخزين الذكي ، ظهرت الرافعات الشوكية الآلية لتوفير تكلفة التشغيل وتحسين أداء سلامة المستودعات. طورت Leishen مجموعة كاملة من أنظمة تطبيق الرافعة الشوكية غير المأهولة التي يمكن تطبيقها على مراكز التخزين اللوجيستية الكبيرة القائمة على أجهزة استشعار Lidar ، والتي يمكن نشرها بشكل فعال في مناولة البضائع عند الطلب في المتطلبات الداخلية والخارجية ، مثل الموانئ والمطارات ومستودعات المصانع و المراكز اللوجستية ، إلخ.
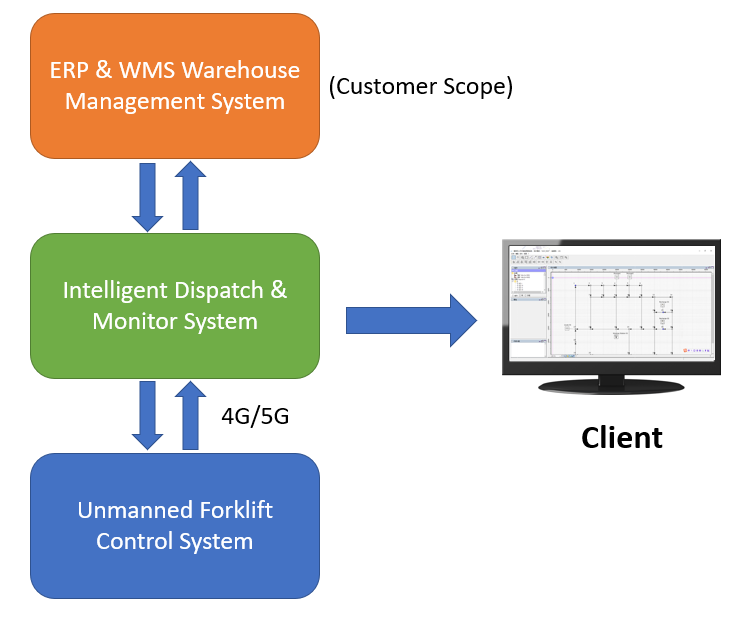
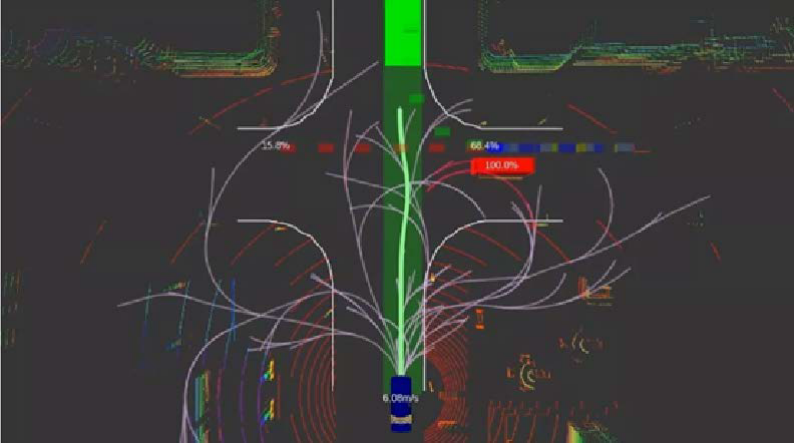
النظام متوافق مع معظم الرافعات الشوكية الكهربائية التي تعمل مع وصول ناقل CAN إلى سائق الرافعة الشوكية. يظهر الهيكل العام للنظام في الصورة أدناه: